Run Time Performance |
 
|
Run Time Performance |
|
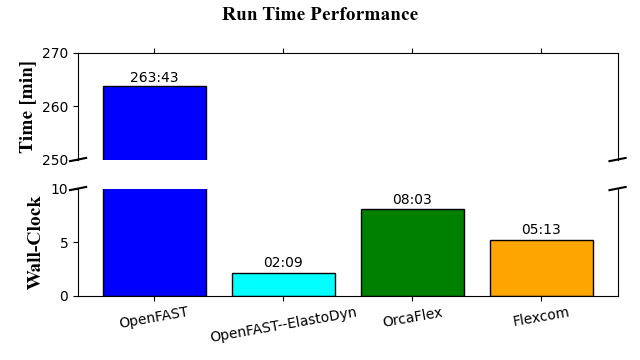
In addition to comparing solution accuracy, the IEA 22 MW reference wind turbine was used to compare the run-time performance of OpenFAST, OrcaFlex and Flexcom. Run-time comparisons are based on the stepped wind test case, in which a time varying wind load is applied in a single continuous simulation. The wind speed starts off at 4 m/s, and increases in steps of 1 m/s, up to the cut-out speed of 25 m/s. The rotor is misaligned with the incoming wind flow, creating a horizontal skew angle of 30°.
Despite some differences in the total number of elements used in the models – largely due to the independent nature of blade property interpolation from the original WindIO dataset – there is significant variation in computation times across different codes. For the stepped wind case, which has a total simulation time of 1060 s, OpenFAST with its ElastoDyn solver returns the quickest run time of just 2:09 (mm:ss), resulting in a computation time to simulation time ratio of just 12%. Notwithstanding the fact that the model does not include a support structure such as a monopile or floating platform, this is exceptionally quick. It should be noted however that the ElastoDyn solver is strictly only valid for straight isotropic blades dominated by bending, so its modelling accuracy is limited. Next quickest is Flexcom, which completes in 5:13 (mm:ss), giving a computation to simulation time ratio of 30%. Although Flexcom adopts the OpenFAST aerodynamic solver, it uses its own structural solver, a non-linear finite element formulation with fully coupled axial, bending and torsional DOFs, with greater computational effort. Next comes OrcaFlex, which completes in 8:03 (mm:ss), offering a computation to simulation time ratio of 46%. This is somewhat unexpected given that the OrcaFlex model has fewer blade structural elements than the Flexcom model (37 rather than 58) so run times would be expected to be quicker than Flexcom. Given that both aerodynamic solvers use BEMT, this suggests that the Flexcom solution technique is more efficient than that of OrcaFlex, an observation which coincidentally aligns with a previous study on mooring line modelling (Connolly et al., 2025). OpenFAST with BeamDyn returns the slowest (significantly) run time of 4:23:43 (hh:mm:ss), equating to a computation to simulation time ratio of almost 1500%. The comparatively poor performance of OpenFAST-BeamDyn is due to the small time-step of 0.001s used in the BeamDyn model (necessary to avoid numerical convergence issues); the other models use a time-step of 0.05 s. According to NREL, a new tight coupling algorithm is under development and will enable much larger time-steps and significantly improved computational performance for BeamDyn (a new release is expected in 2025).
Solver |
Run-Time (hh:mm:ss) |
Computation Time to Simulation Time Ratio |
Number of Structural Elements per Blade |
Solution Time Step (s) |
|---|---|---|---|---|
OpenFAST-ElastoDyn |
02:09 |
12% |
58 |
0.05 |
Flexcom |
05:13 |
30% |
58 |
0.05 |
OrcaFlex |
08:03 |
46% |
37 |
0.05 |
OpenFAST-BeamDyn |
04:23:43 |
1493% |
58 |
0.001 |
For wind turbine modelling, Flexcom 2025.1 appears to be about 2 times faster than OrcaFlex 11.5, while OpenFAST-ElastoDyn 3.5.2 appears to be about 2 times faster than Flexcom 2025.1. OpenFAST-BeamDyn 3.5.2 appears to be an order of magnitude slower than the other solvers, although significantly improved computational performance is anticipated in an upcoming version (2025). Run-time comparisons are based on the IEA 22 MW reference wind turbine subjected to stepped wind loading, dynamically varying in increments from 4 m/s to 25 m/s.
Interested readers are referred to the official technical publication (Britton et. al., 2025) for full details of the benchmarking study. Although the research was performed by Wood Group, the process was fully open and transparent. The authors are grateful to both NREL and Orcina for their professional guidance and timely support regarding the use of their software.
Run-time comparisons were facilitated by command prompt batch files, which ensure consistency and a valid comparison. Each dynamic simulation was performed on its own, with no other simulations competing for CPU resources, affording the solvers a good chance of achieving the quickest possible run time.
Please note that this run-time performance exercise was performed in 2025 so the times above may not necessarily reflect the exact computation speeds of the modelling tools as of today. Run-times for other turbine models (e.g. with different blade properties) or other wind excitation types (e.g. turbulent wind rather than steady) may differ also, so this particular benchmark does not represent a definitive statement on the execution speeds of OpenFAST, OrcaFlex and Flexcom.
The following were the specifications of the test machine.
Parameter |
Value |
|---|---|
Processor |
Intel(R) Core(TM) i7-10700 CPU @ 2.90GHz |
RAM |
32 GB |
Operating System |
Windows 10 Enterprise, 64-bit |
Flexcom |
Version 2025.1.2 |
OrcaFlex |
Version 11.5b |
OpenFAST |
Version 3.5.2 |