OC4 P2 LC3.1 Deterministic, below rated |
 
|
OC4 P2 LC3.1 Deterministic, below rated |
|
This load case is similar to OC4 P2 LC2.1, which does not include wind loading. Similar trends to that observed for OC4 P2 LC2.1 are also evident here.
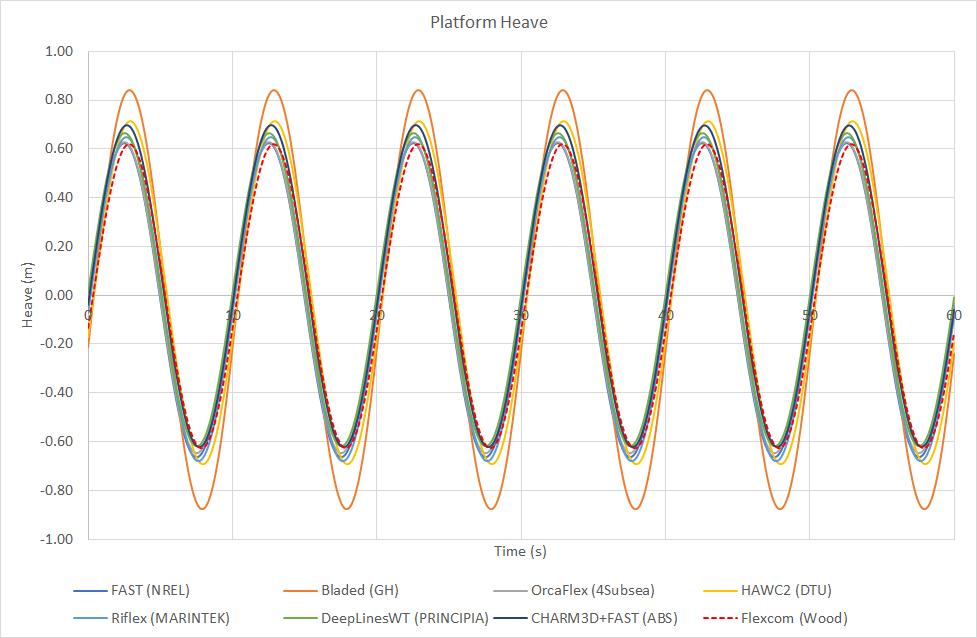
Flexcom's heave response shows close agreement with the other software tools, in terms of response amplitude, period and phase. Results from Bladed (GH) show a heave response which is slightly larger than the other software tools.
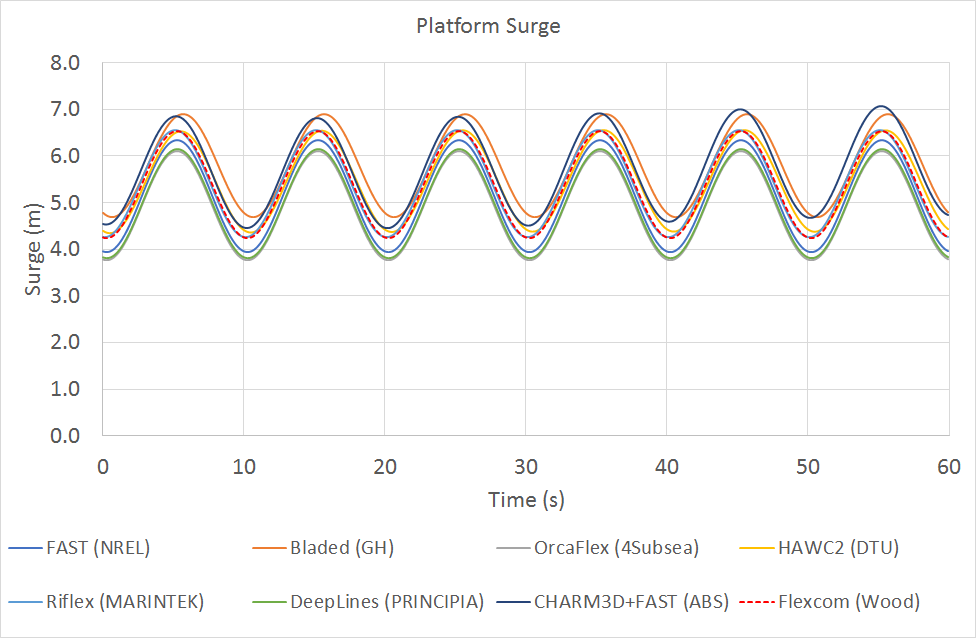
Flexcom's surge response shows close agreement with the other software tools, in terms of response amplitude, period and phase. Although there is some variation across the different software products (depending on how drift forces are being modelled - refer to OC4 P2 LC2.1 for further information), the inclusion of wind tends to improve the correlation in surge results. This is because the wind thrust force is much larger than the hydrodynamic drift force, and hence the mean surge offset is significantly greater when wind is included.
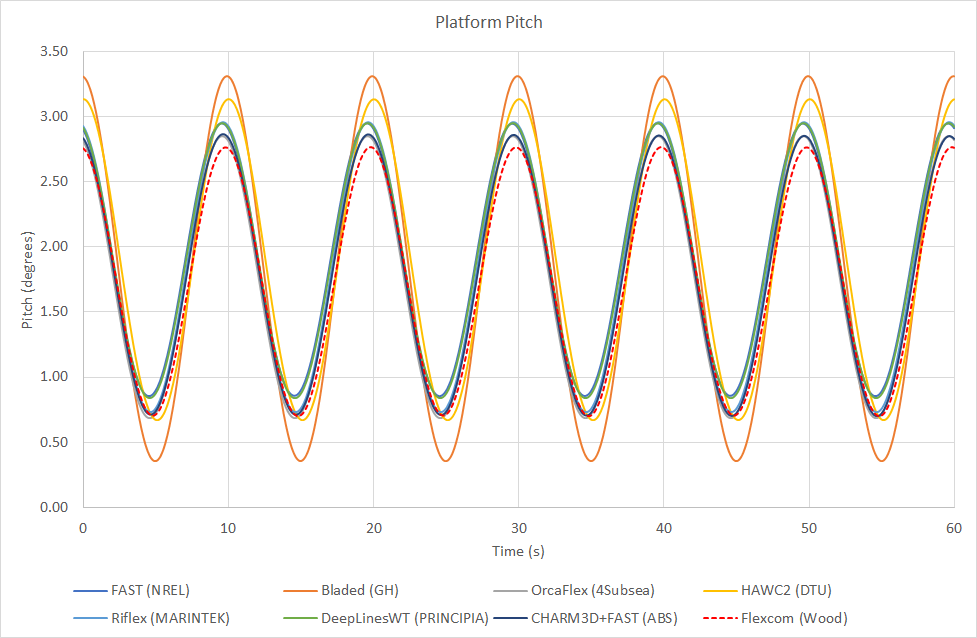
Flexcom's pitch response shows good agreement with the other software tools, although the mean pitch is slightly lower than many of the other tools. Results from Bladed (GH) show a pitch response which is slightly larger than the other software tools.
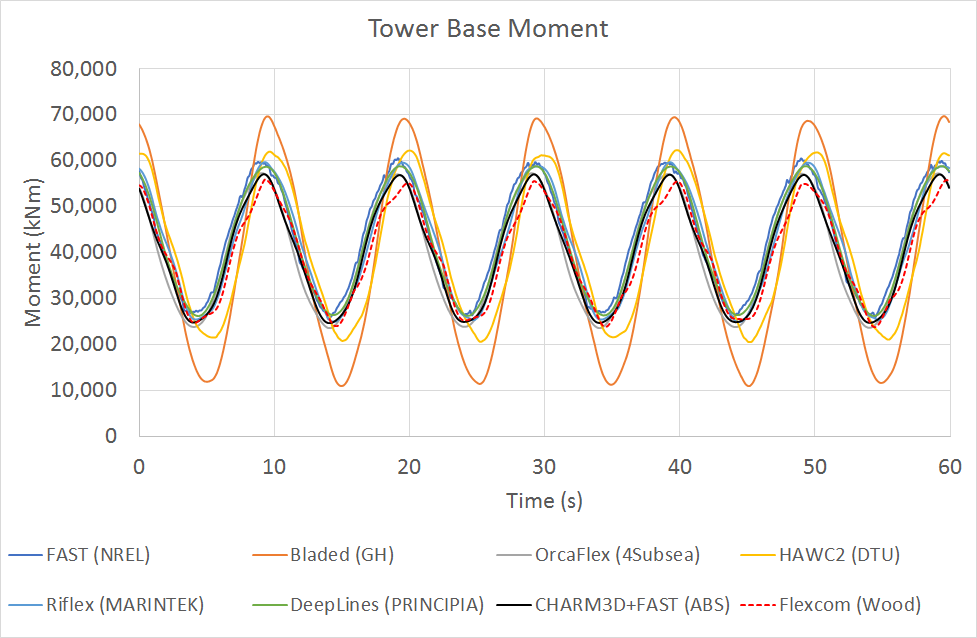
Results from Flexcom show good agreement with the other software tools for bending moment at the base of the tower. The moments predicted by Flexcom are slightly lower than the other tools - it is believed this is related to the generator power discussed in the next paragraph. Results from Bladed (GH) show moment variations which are larger than the other software tools.
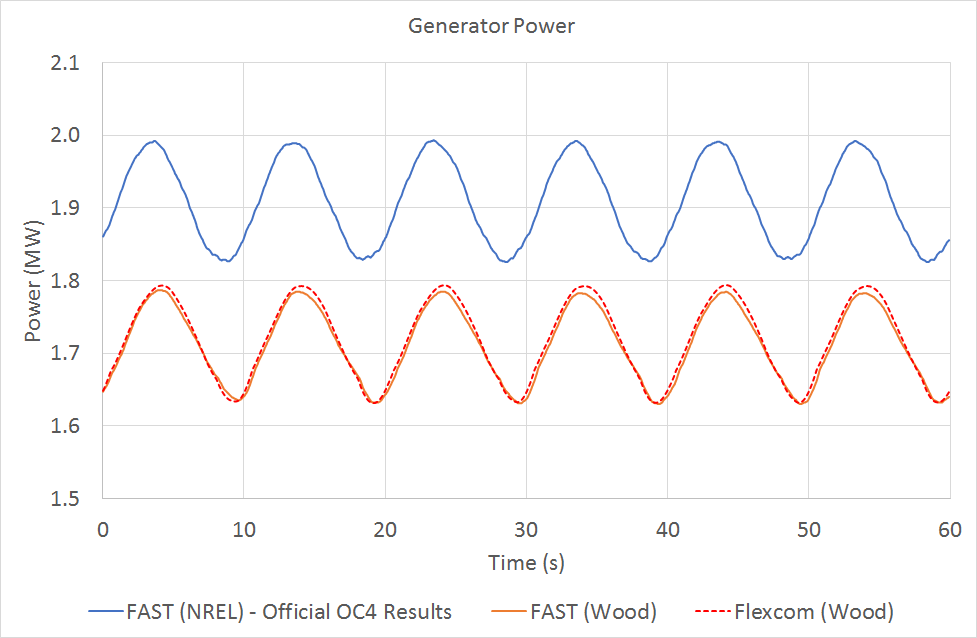
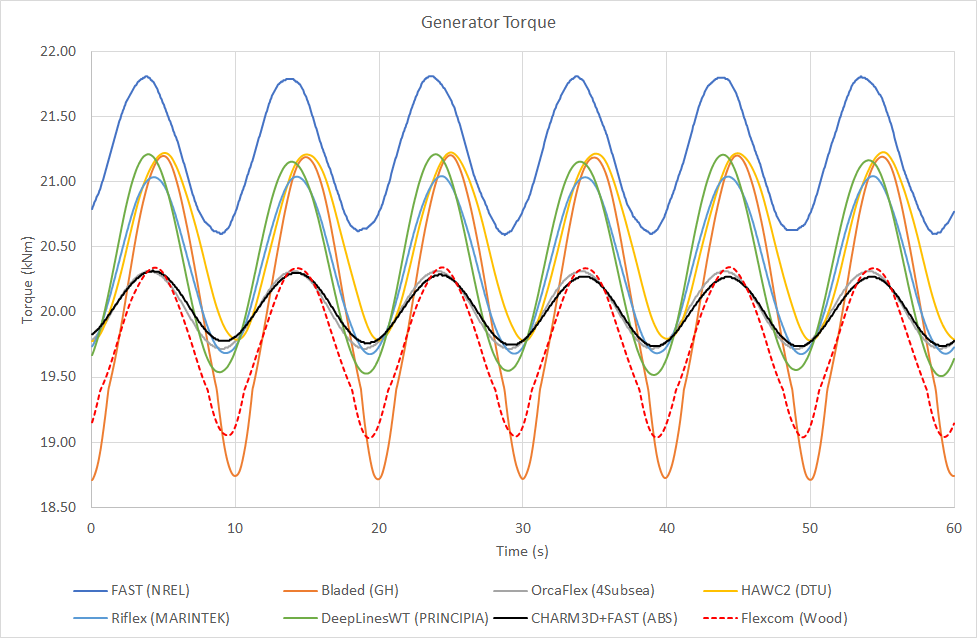
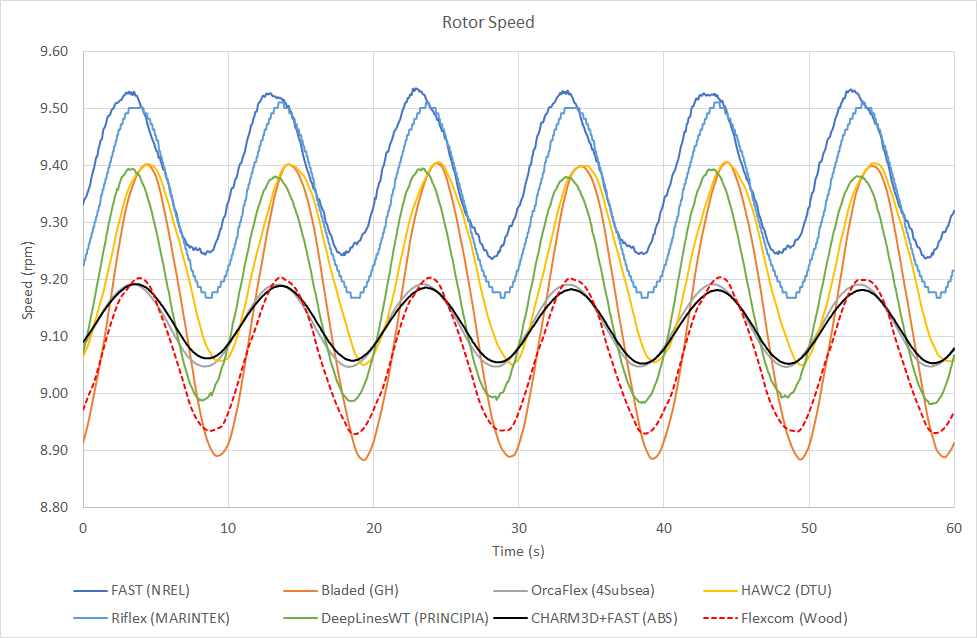
The generator power shows considerable variation across the different software products, with the mean power of the OC4 software tools considered ranging from 1.75MW (OrcaFlex/4Subsea, CHARM3D+FAST/ABS) to 1.99MW (Riflex/MARINTEK). The generator power predicted by Flexcom is slightly lower than most of the other software tools - Flexcom's mean power is 1.72MW, 6.6% below the average.
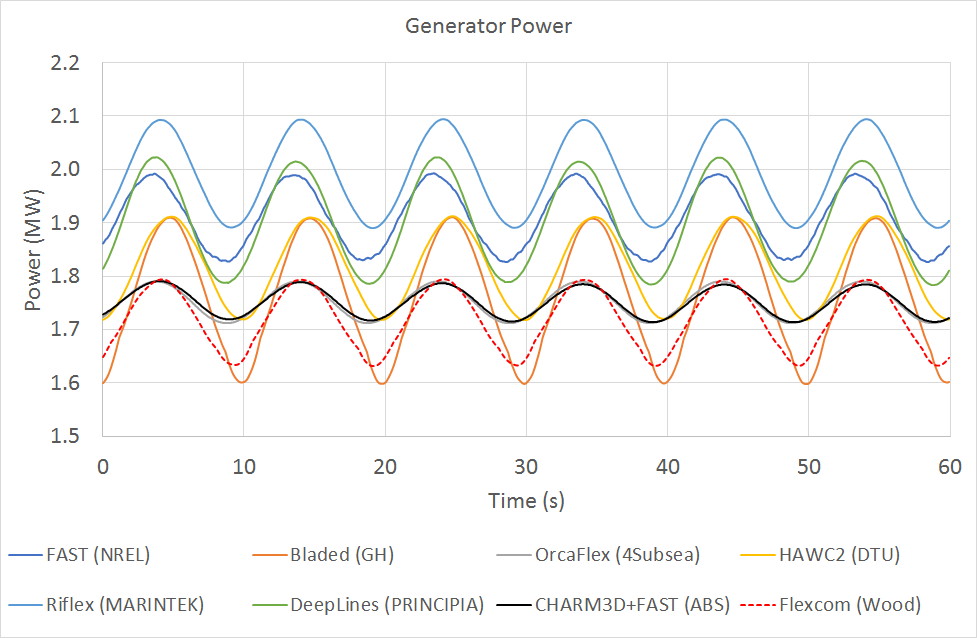
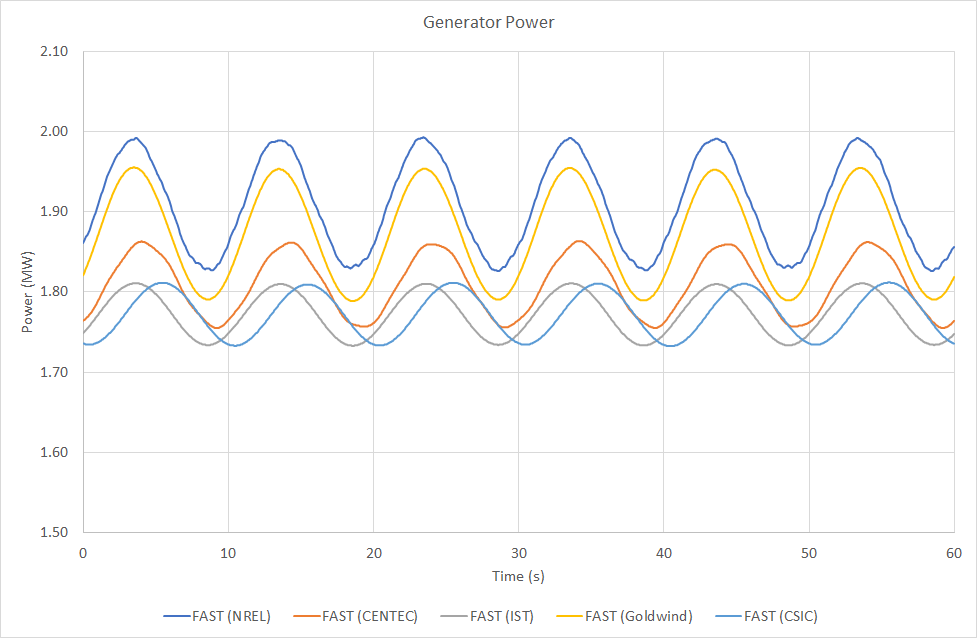
Generator power is not discussed in Robertson et al. (2014) but given that this is such a fundamental output for a wind turbine, closer agreement might have been expected, particularly given that the same control system (originally developed for the OC3-Hywind spar) was provided to all participants in form of a DLL which could be linked into the individual software products. For example, even amongst the participants who use FAST, the average power varies from 1.77MW (IST), 1.77MW (CSIC), 1.81MW (CENTEC), 1.87MW (Goldwind) to 1.91MW (NREL).
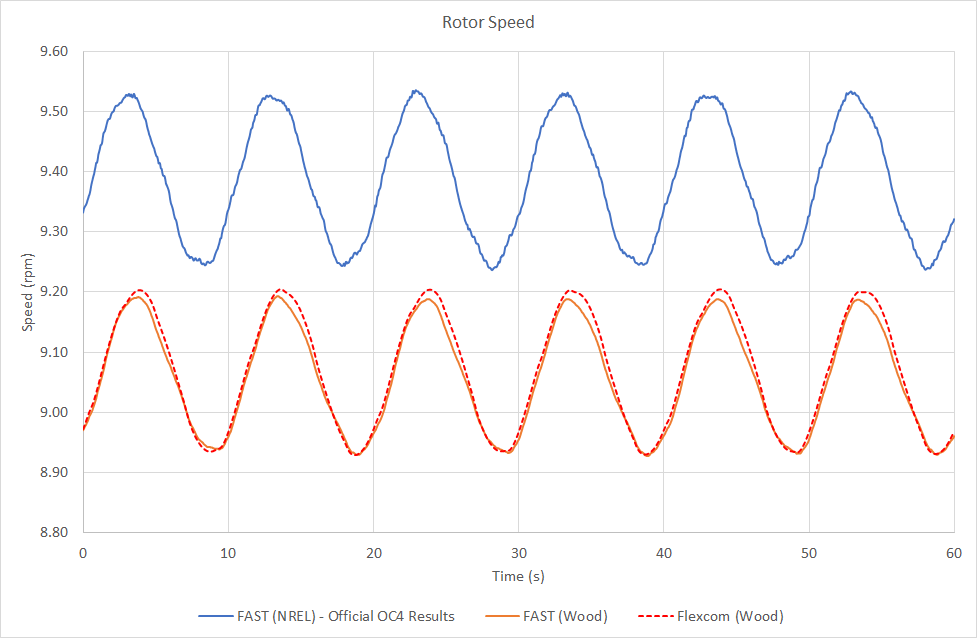
The variations in generator power are also evident in the primary variables of generator torque and rotor speed.
Discrepancies in generator power may be caused by several factors, including...
1.Variations in the aerodynamic theories underpinning each software product
2.Inconsistencies in user selection of aerodynamic modelling options within the software
3.Participants using different versions of the same software product
4.Discrepancies in computed platform motions which influence aerodynamic performance
Given that Flexcom uses the AeroDyn and ServoDyn modules directly from FAST, any difference in generator power is most likely to stem from the last two sources.
In an effort to better understand the discrepancies, we attempted to recreate the official OC4 results presented by NREL for OC4 P2 LC3.1. We downloaded an official release of FAST, Version 8.16, which appeared to be the latest version available at the time of writing. Although the sample input files provided by NREL corresponded to OC4 P2 LC3.7 (these were the only input files published by NREL), it was a simple task to recreate the input files required for OC4 P2 LC3.1, by simply adjusting the wave loading from a white noise spectrum to a regular Airy wave. We found that key output parameters, such as mean generator power and rotor speed, predicted by FAST V8.16 to be considerably lower than those presented in Robertson et al. (2014). When these discrepancies were queried with NREL via their online user forum, NREL advised that "the CertTest model (i.e. the more recent version) uses AeroDyn15 with BEMT (i.e. blade element momentum theory), while the original OC4 simulation used AeroDyn14 with DYNIN (i.e. dynamic inflow)", and that "for the original OC4 simulation the mooring system was modeled through a quasi-static approach and the current Test25 model (i.e. the more recent version) uses a dynamic mooring line model", and consequently that "due to these different modelling approaches it is expected to observe some differences in predicted system response between the two models". As the Flexcom results show much closer agreement with FAST V8.16, it is concluded that the much of the difference between Flexcom and the official OC4 results presented by NREL stem from different versions of the aerodynamic modelling software. The remaining discrepancy may be attributed to slightly different platform motions being predicted by Flexcom and FAST. Furthermore, results obtained by Flexcom appear to be consistent with expectations as the mean rotor speed is closer to 9rpm, which is consistent with the official load case definition.