Model Summary |
 
|
Model Summary |
|
The articulated stinger is composed of three rigid sections which are linked together using flexible connections. The stinger is also connected to the vessel at its upper end, and is free to oscillate vertically subject under the downward load of the pipeline weight and the uplift provided by the stinger’s buoyancy.
Rollerbox supports are located at regular intervals along the stinger and vessel, and each support is modelled using a combination of three flat guide surfaces in the form of a “U” shape. The figure below shows a close up of one of the rollerboxes. The supports on the vessel move rigidly with the vessel as it translates and rotates in response to the applied wave loading. The supports on the stinger are associated with structural nodes which are connected to the stinger sections, so the motions of these supports actually form part of the solution (i.e. their motions are not prescribed via the vessel RAO data).
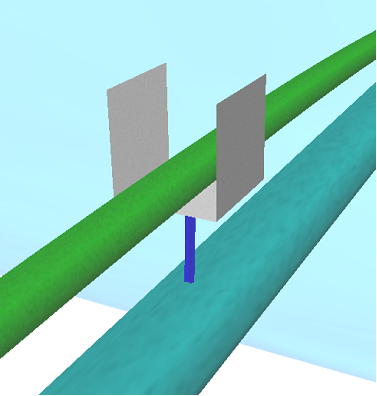
Rollerbox Model
The pipeline is modelled as a series of consecutive lines running from the seabed, over the stinger and vessel, and connected to the vessel using a tensioner (non-linear spring) element. In order to ensure an efficient solution, potential contact regions are associated with each support by defining relatively small contact element sets.
An important aspect of the contact algorithm is how Flexcom handles the interaction between the structure and the guide surfaces. Each node that is potentially in contact with a guide surface may be considered to be connected to the surface by means of a non-linear spring which has an orientation normal to the surface. Theoretically, the force in the spring is zero until the node makes contact with the surface, at which point the linear spring stiffness is activated. While this formulation is theoretically correct, it is not especially robust, so Flexcom can use a modified spring force-deflection curve shown in the figure below instead. Adopting a non-linear approach tends to lessen the effects of instantaneous impact, reduce high frequency noise, and consequently allows the solution to proceed at larger time step increments.
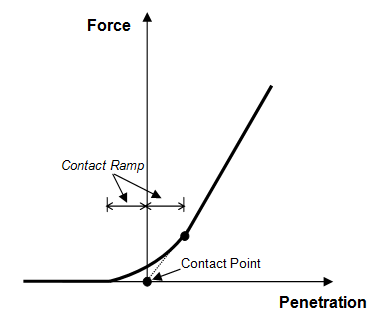
Non-Linear Contact Model
Further details are available in Contact Modelling.