Relevant Inputs |
 
|
Relevant Inputs |
|
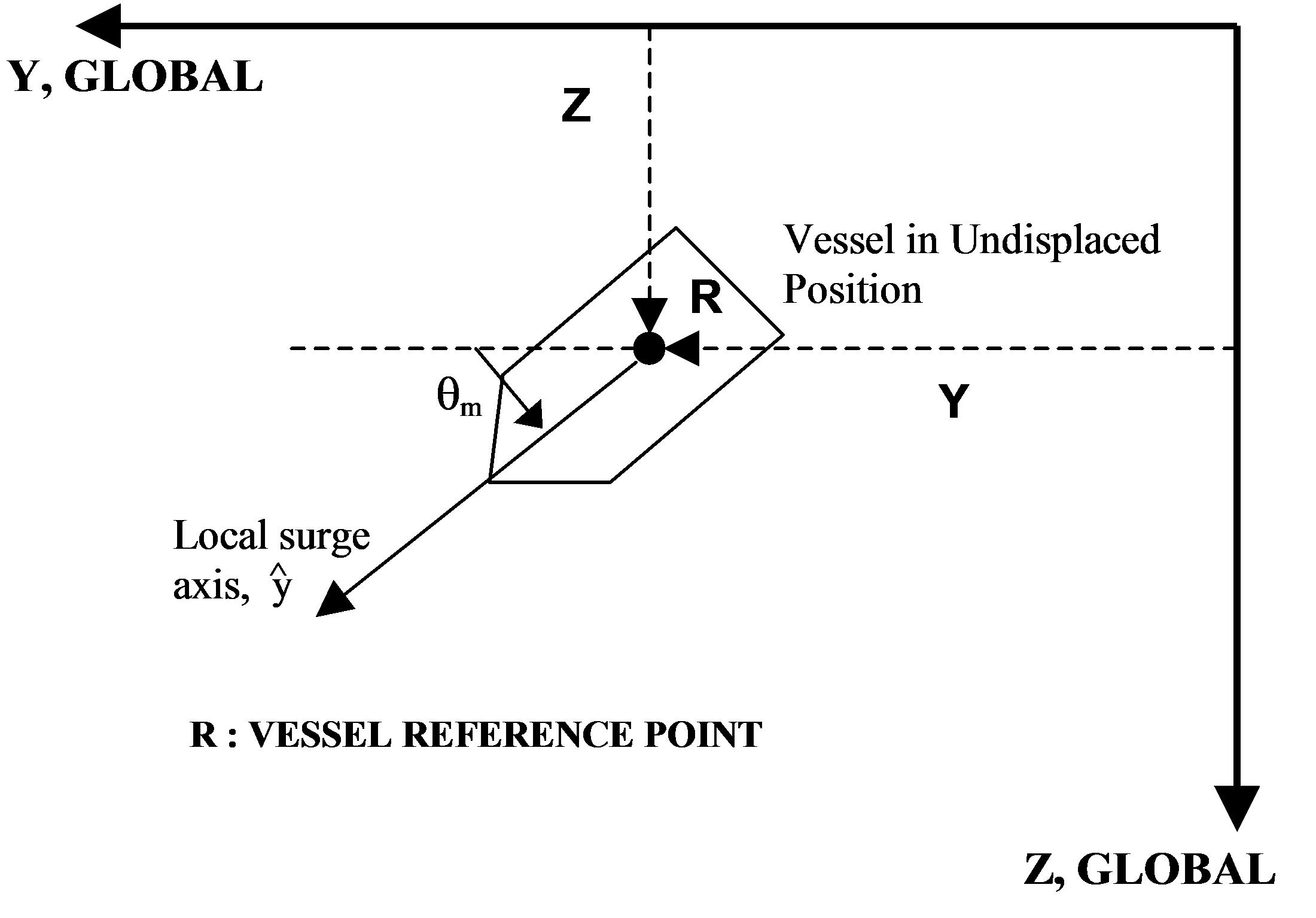
Three sets of inputs are required to completely define the response of each floating vessel to the ambient wave field (the use of one set is optional). The first set defines the vessel initial position, that is, the location of the vessel prior to the application of any vessel offset or dynamic motions. This location usually corresponds to the structure location in an initial static analysis. There are two inputs in this first set. The first is the location (coordinates) of the vessel reference point in the vessel initial position. The second input is the orientation of the vessel relative to the global coordinate axes in this initial position. These two sets of inputs completely define the vessel configuration prior to the application of any vessel offset. The definition of these parameters is illustrated schematically in the figure below. The reference point location is defined in terms of coordinates in the global coordinate system. The vessel orientation is defined in terms of the angle between the positive direction of the global Y-axis and the ![]() direction of a local vessel coordinate system centred on the reference point. The significance of this local axis system is described in the next section.
direction of a local vessel coordinate system centred on the reference point. The significance of this local axis system is described in the next section.
Initial Vessel Configuration
The next (second) set of inputs is used to specify the offset of the vessel from its initial position and orientation. These entries are optional and are only specified if the vessel is offset from its initial location and orientation before the commencement of the dynamic analysis. Flexcom offers a full 6 degree of freedom offset capability, comprising three translations and three rotations. Together, the vessel initial position and offset define the position and orientation of the vessel at the initiation of the dynamic analysis.
The third and final set of inputs is the full vessel RAOs and phase angles in all vessel degrees of freedom. Given the vessel initial position, offset and RAOs, in addition to the time history of wave elevation, the motion of the reference point in response to the wave field throughout an analysis can be calculated, and from this the motion of the point(s) on the structure attached to the vessel.