Seabed Friction Modelling Algorithm |
 
|
Seabed Friction Modelling Algorithm |
|
At every iteration at every solution time of a Flexcom analysis, the program monitors all the nodes in the structural model for contact with the seabed (as long as either a rigid or elastic seabed has been specified as part of the model). If a node is in contact with the seabed, and if either or both of the seabed friction coefficients are non-zero, then the program effectively ‘attaches’ the node to the seabed (in the plane of the seabed). In general, this attachment can be achieved by means of either a boundary condition or a non-linear spring. For a variety of reasons, the approach taken in Flexcom is to use non-linear springs.
In an ideal (that is, Coulomb) friction model, each of these non-linear springs would have a force-deflection relationship such as that shown in the figure below. Consider for the moment that the figure below refers to the longitudinal direction. If there is no longitudinal force on the node, the node does not move (corresponding to zero deflection in the below figure). Indeed, the node should remain in the same location until the total force on the node exceeds the limiting friction force (μR where μ is the friction coefficient and R is the normal reaction), at which point the node may move with this movement resisted by a constant force equal to the limiting friction force.
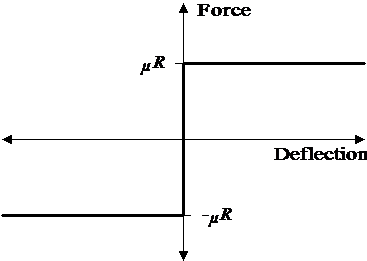
Ideal Seabed Friction Model
The main difficulty with implementing such a friction model in a finite element program such as Flexcom, which solves for deflections, is that the stiffness of the ideal spring is effectively infinite in the region corresponding to zero deflection. This would make it virtually impossible for the program’s iterative solution scheme to converge on the correct solution. To get around this difficulty, a slightly modified non-linear spring characteristic, such as that shown in the figure below, is employed instead.

Flexcom Seabed Friction Model
This spring characteristic has the region around the zero-deflection point replaced by a section of very high (but not infinite) stiffness. This point is crucial to the operation of the seabed friction model. The stiffness of this section of the force-deflection curve is given by the expression:
![]() (1)
(1)
Here Lm is what is known as the ‘mobilisation length’, which is user-configurable.
If you are using the older keyword inputs (i.e. *RIGID SURFACE or *ELASTIC SURFACE), the mobilisation length is based on the ‘characteristic length’ if it is not explicitly specified. The characteristic length itself is governed by the Maximum Characteristic Length input and the finite element mesh discretisation. Specifically, the characteristic length for a given node is equal to the minimum length of the elements which share the node, or the Maximum Characteristic Length input (which defaults to 3.048m or 10ft), whichever is the lesser. In this case, the mobilisation length is equal to one twentieth (5%) of the characteristic length. Where the Mobilisation Length input is explicitly specified, it takes precedence over the Maximum Characteristic Length entry – in this case the latter value is immaterial as it is unused.
If you are using the newer keyword inputs (i.e. *SEABED PROFILE and *SEABED PROPERTIES), the mobilisation length defaults to 0.15m (or the equivalent in feet) if it is not explicitly specified.
Clearly, the value of Lm affects the stiffness of the non-linear spring – the smaller this value, the greater is the stiffness and the closer the friction model is to an ideal model. However, reducing Lm makes it harder for the program to converge on a solution. Note also that separate mobilisation lengths may be used in both the longitudinal and transverse directions, with the longitudinal value typically being shorter than the transverse one.
The major advantage of using this approach to modelling seabed friction is that it allows the program to find the structure configuration very rapidly (typically in only a few iterations) because it is able to solve directly for displacements. An alternative formulation, using boundary conditions, would in general require significantly more iteration to find the structure configuration. This is because one iteration would be required for each node where limiting friction has been exceeded to be restrained – so for a situation where a substantial section of the model is in contact with the seabed, the number of iterations required could be significant.
•*SEABED PROPERTIES is used to specify properties such as seabed type (i.e. rigid or elastic) and friction parameters. Specifically, the FRICTION= input is used to specify friction data such as friction coefficients and mobilisation lengths.