Contact Ramp |
 
|
Contact Ramp |
|
When two lines come into close proximity, the interaction between the two lines is effectively modelled by the insertion of a non-linear spring between the points at which minimum separation occurs. Theoretically, the spring should have a force-deflection (or penetration) characteristic similar to that shown in the first figure below, whereby the force in the spring is zero until the lines come into contact, at which point a relatively large linear spring stiffness is activated. While this formulation is theoretically correct, you may wish to specify that a contact ramp is to be applied, in which case a force-deflection characteristic similar to that shown in the second figure below is used instead. So rather than the contact stiffness being activated suddenly when contact occurs, the contact force is gradually ‘ramped up’. This means that there is some contact force present before contact actually occurs, but you may feel that the modelling inaccuracy is outweighed by increased solution robustness (for example, you may be able to use larger time steps).
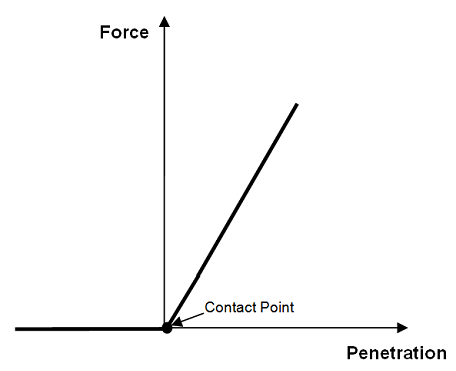
Theoretical Force-Deflection Characteristic
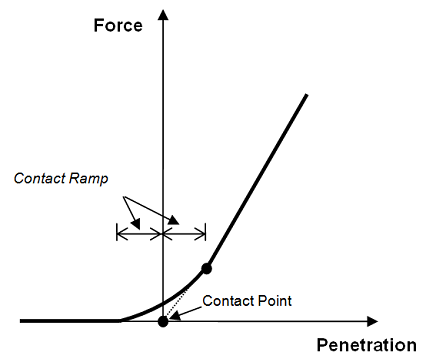
Force-Deflection Characteristic with Contact Ramp
•*CLASHING SOLUTION is used to specify solution parameters associated with clashing.